REF 20.06ROB







Préhenseur électropermanent pour robotisation
-
- Grande Force d'Attraction
- Innovant
- Conforme norme: EN13155
-
- Grande Force d'Attraction
- Innovant
- Conforme norme: EN13155
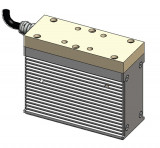
. Manutention des pièces planes et cylindriques
. Système magnétique électropermanent pour manipulateur ou robot, maintien des pièces en cas de coupure de courant
. Sans consommation électrique pendant les phases de levage
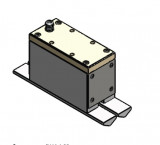
. Corps robuste en acier
. Longueur de câble 3 m
. Fixation par taraudages sur la face supérieure
. Coeficient de sécurité > 3
. Système magnétique électropermanent pour manipulateur ou robot, maintien des pièces en cas de coupure de courant
. Sans consommation électrique pendant les phases de levage
. Corps robuste en acier
. Longueur de câble 3 m
. Fixation par taraudages sur la face supérieure
. Coeficient de sécurité > 3
-
Utilisation :
- Manutention
-
Alimentation :
- 195 VCC
-
Service :
- 100 %
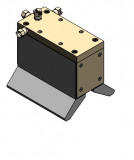
- Pôles auxilliaires pour prise de pièces cylindriques
- Toutes autres dimensions et formes spéciales
- Autres tensions
- Toutes autres dimensions et formes spéciales
- Autres tensions


. La force nominale indiquée est variable en fonction de la nuance d'acier, de l'état de surface, l'épaisseur de matière et la surface en contact avec la pièce à manutentionner.
Colonne G : force magnétique
Colonne G : force magnétique
| Qté | Libellé | Poids en kg | A | B | C | D | E | F | G |
|---|---|---|---|---|---|---|---|---|---|
| 20.06ROB.250 | 7,0 | 170 | 60 | 143 | 150 | 100 | 45 | 250daN | |
| 20.06ROB.500 | 18,0 | 210 | 100 | 143 | 200 | 115 | 75 | 500daN |
indication_tableau_dessus
indication_tableau_dessous